14
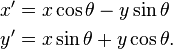
क्या निम्न में से कोई भी दृष्टिकोण किसी बिंदु को घूर्णन के लिए सही गणित का उपयोग करता है? यदि हां, तो कौन सा सही है?उत्पत्ति के आसपास एक बिंदु घूर्णन के लिए उचित त्रिकोणमिति
POINT rotate_point(float cx,float cy,float angle,POINT p)
{
float s = sin(angle);
float c = cos(angle);
// translate point back to origin:
p.x -= cx;
p.y -= cy;
// Which One Is Correct:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
// translate point back:
p.x = xnew + cx;
p.y = ynew + cy;
}

मैं डॉन ' काफी समझ में नहीं आता है। सीएक्स और साइ क्या हैं? साथ ही, आपने अपना काम POINT प्रकार घोषित कर दिया है, लेकिन यह POINT, या वास्तव में कुछ भी वापस नहीं करता है। –
@ ब्रायन हूपर: सार्थक परिवर्तनीय नामों के लाभों को इंगित करने के लिए +1;) – Cogwheel